

 QQ
QQ
当前使用的ABB机器人型号为IRB1410,其承重能力为5KG,上臂可承受18KG的附加载荷,这在同类机器人中绝无仅有。大工作半径1444mm,常用于焊接与范围搬运,具可再扩展一个外部轴的能力。
主电源、计算机供电单元、计算机控制模块(计算机主体)、输入/输出板、Customer connections(用户连接端口)、FlexPendant接口(示教盒接线端)、轴计算机板、驱动单元(机器人本体、外部轴)。机械手为六轴组成的空间六杆开链机构,理论上可达到运动范围内任何一点。每个转轴均带一个齿轮箱,机械手运动精度(综合)达正负0.05mm至正负 0.2mm。六轴均带AC伺服电机驱动,每个电机后均有编码器与刹车。机械手带有串口测量板(SMB),测量板上带有六节可充电的镍铬电池,起到保存数据的作用。机械手带有手动松闸按钮,维修时使用,非正常使用会造成设备或人员被伤害。机械手带有平衡气缸或弹簧。
确保已在机器人系统安装过程中设置了基坐标系和大地坐标系。同时确保附加轴也已设置。在开始编程前,根据需要定义工具坐标系和工件坐标系。以后添加更多对象时,您同样需要定义相应坐标系。
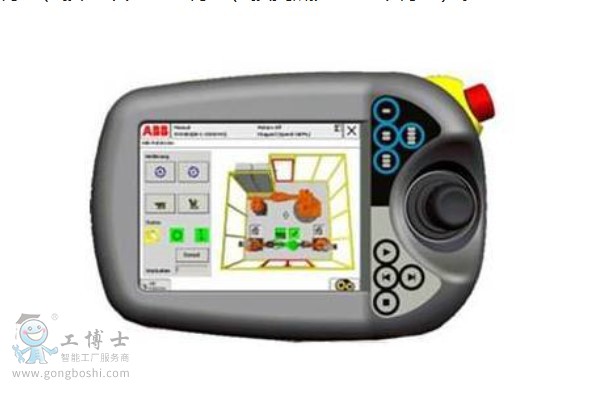
FlexPendant 设备(有时也称为 TPU 或教导器单元)用于处理与机器人系统操作相关的许多功能: 运行程序;微动控制操纵器;修改机器人程序等。使能器的上的三级按钮(默认不按为一级不得电、按一下为二级得电、按到底为三级不得电)。
- 下一篇:ABB:塑造数字化行业领军者
- 上一篇:ABB逐浪工业4.0
